A nonlinear pendulum
Contents
- The differential equation:
- The corresponding system of the first order differential equations:
- Input initial conditions:
- Define the interval on which solution is computed:
- Solve the system using ode45 procedure:
- Extract the positions and velocities:
- Plots of the positions and velocities as functions of time:
- Plot of the phase portrait (velocity as the function of position):
The differential equation:

The corresponding system of the first order differential equations:

Input initial conditions:
z0=[0,1];
Define the interval on which solution is computed:
tspan =[0,20];
Solve the system using ode45 procedure:
[t,z] = ode45('ode3',tspan,z0);
Extract the positions and velocities:
x=z(:,1); v=z(:,2);
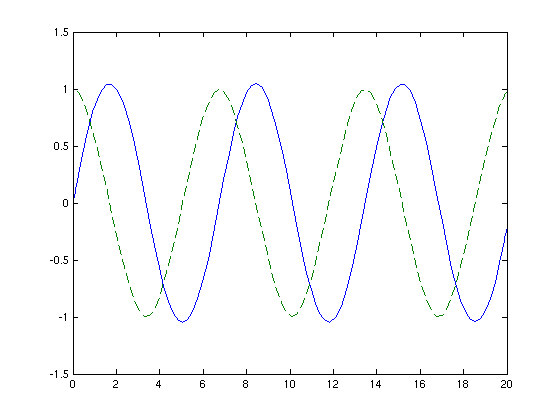
Plots of the positions and velocities as functions of time:
Note: The dashed curve indicates velocities
plot(t,x,t,v,'--')
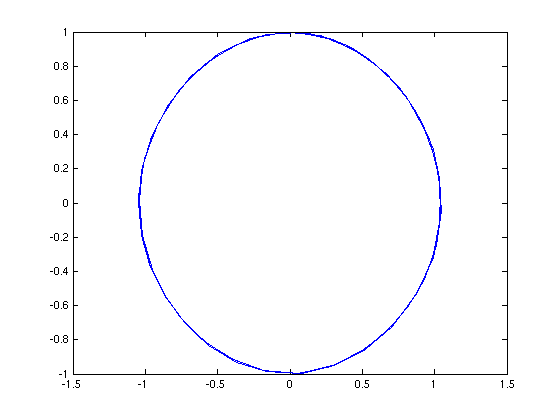
Plot of the phase portrait (velocity as the function of position):
figure(2) plot(x,v)