Choose a present time:
Choose a future time:
Description:
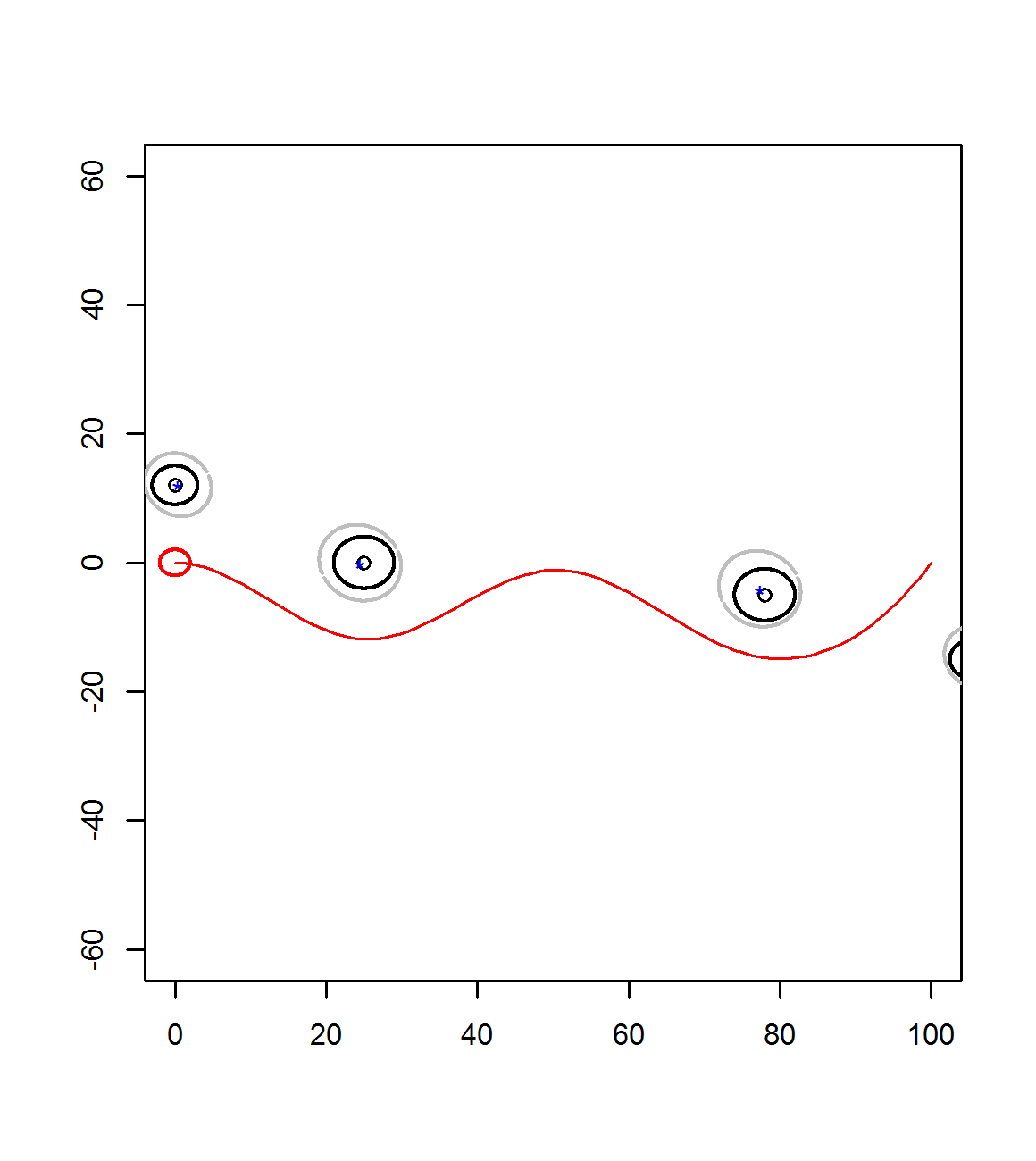
Small black circle: true center position of obstacle
Blue star: estimated position of obstacle
Black circle: area of obstacle with radius r
Grey ellipse: confidence ellipse around obstacle
Red circle: autonomous robot/car
Red line: estimated robot trajectory
This is a visualization of an example of an obstacle field.
At the present time "t", the algorithm uses the past observed (by radar) positions of the obstacles to estimate their future positions. With the estimated parameters from the measurement errors of the radars, a confidence ellipse is created around each obstacle. The red curve is the estimated trajectory the robot should travel in order to avoid the confidence ellipses. Note that when "future" is played, the ellipses increase in size; this is due to the increasing difficulty to predict far into the future (similar results to time series analysis).