
Faculty Advisor: Dr. Ashley Geng
Project Description:
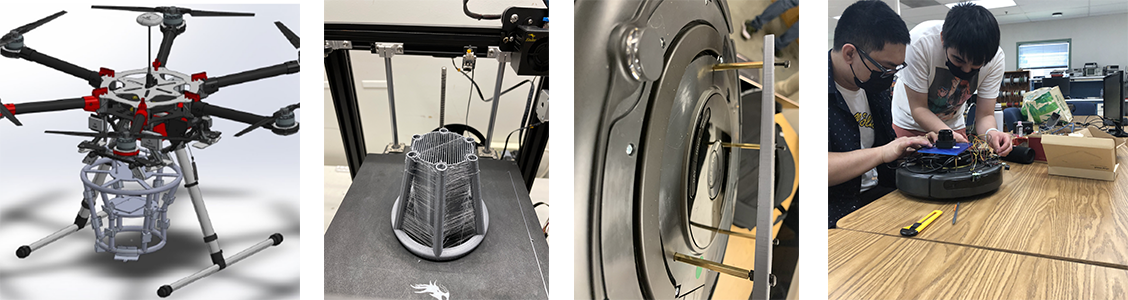
The overall goal of this project is to implement a smart drone pallet integrated with various sensors to collect and process real time flight data. This data is to be utilized in object detection and collision avoidance algorithms for the Urban Air Mobility (UAM) mission. However, in its current stage, the project is in the intermediate stage integrating various sensors using Robot Operating System (ROS) working synchronously on a Roomba bot.